Gerçek lövye ile model uçurmak
- Konbuyu başlatan Sumer Yamaner
- Başlangıç tarihi
- 54,160
-
Forumdan daha fazla yararlanmak için buradan ÜYE olabilirsiniz
Çok eski bir web tarayıcısı kullanıyorsunuz. Bu veya diğer siteleri görüntülemekte sorunlar yaşayabilirsiniz..
Tarayıcınızı güncellemeli veya alternatif bir tarayıcı kullanmalısınız.
Tarayıcınızı güncellemeli veya alternatif bir tarayıcı kullanmalısınız.
Ömer Erkan
RcFanatik
- Katılım
- 4 Eki 2012
- Mesajlar
- 3,601
- Tepkime puanı
- 6,216
- Yaş
- 68
- Konum
- Başiskele - Kocaeli
- İlgi Alanı
- Uçak
Gerçek lövye ile model uçurmak
Sümer bey, gerçekten tebrik ederim. Süper bir iş olmuş! Şimdi bir de modelin içine bir kamera koyup, bir gözlük ile FPV yapmak kaldı. İşte o zaman var ya...
Şimdi bir de modelin içine bir kamera koyup, bir gözlük ile FPV yapmak kaldı. İşte o zaman var ya...
Yalnız elinde kumandayı tutan yanındaki arkadaşın eli, acil durum için sürekli eğitim mandalının üzerinde, değil mi?
Sümer bey, gerçekten tebrik ederim. Süper bir iş olmuş!
Şimdi bir de modelin içine bir kamera koyup, bir gözlük ile FPV yapmak kaldı. İşte o zaman var ya...Yalnız elinde kumandayı tutan yanındaki arkadaşın eli, acil durum için sürekli eğitim mandalının üzerinde, değil mi?
- Katılım
- 17 Eyl 2013
- Mesajlar
- 9,347
- Tepkime puanı
- 24,175
- Yaş
- 63
- Konum
- İstanbul
- Web sitesi
- www.sumeryamaner.com
- İlgi Alanı
- Uçak
Gerçek lövye ile model uçurmak
Aynen öyle. Trainer kablolu uçuş sonuçta. Ben lövye ile öğrenci konumundayım ana kumanda ise hocanın elinde. Ben saçmaladığımda o hemen kumandayı devralıyor.
Sistem için uzun vadeli planlarım var.
1- Daha iyi bir mekanik altyapı oluşturmak.
2- Daha fazla sayıda giriş çıkışı olan bir kart (Arduino Mega gibi) kullanıp bir LCD gösterge eklemek.
3- LCD gösterge ve birkaç ek buton yardımıyla model hafızaları oluşturmak ve (hesabıma göre 50 kadar modeli hafızaya almak).
4- EPA, Expo, Subtrim vs gibi temel ayarları LCD ekran ve butonlarla yapmak.
5- Bir FPV ekranı eklemek.
Zafer yine laf edecek ama bugün ciddi bir sorun yaşadık. Havada değil tabii... Ayarlar esnasında oldu. Sebebi de hazır kütüphane kullanımı. Arkadaşlarımız hazır kütüphaneleri seviyor ama eğer kullandığınız kütüphanenin her türlü inceliğini bilmiyorsanız özellikle zamanlaması kritik işlemlerde beklenmedik sorunlar yaşayabiliyorsunuz.
Kısaca anlatayım...
Oluşturduğum yazılım trim değerlerini işlemci bünyesindeki EEPROM'a kaydediyor. Başlangıçta son değerleri oradan okuyor. Trimler değiştikçe de EEPROM'daki değerleri update ediyor. Bu amaçla EEPROM library kullanıyorum çünkü henüz kendi imkanlarımla EEROM'a müdahale edebilecek durumda değilim.
Bugün test aşamasında baktık ki peşpeşe birkaç tık trim verdiğimizde sistem kilitleniyor. Sonunda EEPROM'a yazma olayını iptal ederek uçabildik. Yoksa kumanda kaybına varabilecek sorunlar yaşanabilirdi.
Az önce epey bir kaynak karıştırdım. EEPROM'a yazma işlemi karmaşık bir iş. Peşpeşe birkaç byte yazacak olursak milisaniye düzeyinde gecikmeler oluyor. Benim orijinal kodda herhangi bir trim değiştiğinde tüm trimler yeniden EEPROM'a yazılıyordu. Yani toplam sekiz byte. Bu da 30 - 40 mS zaman demek. Bu süre boyunca PPM sinyali üretilemiyor. Master kumanda da bu kadar uzun süre sinyal gelmeyince artık trainer kablosu takılı değil diye algılıyor. Sinyal sonradan geri gelse de bir şey değişmiyor. Hatta Aurora yazılımındaki bir bug nedeniyle bazen ana kumanda da kontrol etmemeye başlıyor ve model kontrolsüz kalıyor. Korkunç!!!
İşte bu gece bu özelliği saptayınca iki ayrı önlem aldım. Birincisi sadece değişen trim değerini EEPROM'a yazıyorum. İkincisi her byte'ı yazdıktan sonra zamanı kontrol ediyorum ve fazla gecikme olduysa bir "porsiyon" PPM sinyali üretip sonra EEPROM ile işime devam ediyorum. Tabii yine de aklıma gelmeyen bir sorun olabilir. Uçak ile test etmek şart.
Demem o ki, çok basit bir EEPROM işlevi için bile kütüphane kullanınca o kütüphanenin ayrıntılarını anlamak gerekiyor ki böyle beklenmedik sıkıntılar yaşanmasın.
Omer Erkan' Alıntı:Yalnız elinde kumandayı tutan yanındaki arkadaşın eli, acil durum için sürekli eğitim mandalının üzerinde, değil mi?
Aynen öyle. Trainer kablolu uçuş sonuçta. Ben lövye ile öğrenci konumundayım ana kumanda ise hocanın elinde. Ben saçmaladığımda o hemen kumandayı devralıyor.
Sistem için uzun vadeli planlarım var.
1- Daha iyi bir mekanik altyapı oluşturmak.
2- Daha fazla sayıda giriş çıkışı olan bir kart (Arduino Mega gibi) kullanıp bir LCD gösterge eklemek.
3- LCD gösterge ve birkaç ek buton yardımıyla model hafızaları oluşturmak ve (hesabıma göre 50 kadar modeli hafızaya almak).
4- EPA, Expo, Subtrim vs gibi temel ayarları LCD ekran ve butonlarla yapmak.
5- Bir FPV ekranı eklemek.
Zafer yine laf edecek ama bugün ciddi bir sorun yaşadık. Havada değil tabii...
Ayarlar esnasında oldu. Sebebi de hazır kütüphane kullanımı. Arkadaşlarımız hazır kütüphaneleri seviyor ama eğer kullandığınız kütüphanenin her türlü inceliğini bilmiyorsanız özellikle zamanlaması kritik işlemlerde beklenmedik sorunlar yaşayabiliyorsunuz.Kısaca anlatayım...
Oluşturduğum yazılım trim değerlerini işlemci bünyesindeki EEPROM'a kaydediyor. Başlangıçta son değerleri oradan okuyor. Trimler değiştikçe de EEPROM'daki değerleri update ediyor. Bu amaçla EEPROM library kullanıyorum çünkü henüz kendi imkanlarımla EEROM'a müdahale edebilecek durumda değilim.
Bugün test aşamasında baktık ki peşpeşe birkaç tık trim verdiğimizde sistem kilitleniyor. Sonunda EEPROM'a yazma olayını iptal ederek uçabildik. Yoksa kumanda kaybına varabilecek sorunlar yaşanabilirdi.
Az önce epey bir kaynak karıştırdım. EEPROM'a yazma işlemi karmaşık bir iş. Peşpeşe birkaç byte yazacak olursak milisaniye düzeyinde gecikmeler oluyor. Benim orijinal kodda herhangi bir trim değiştiğinde tüm trimler yeniden EEPROM'a yazılıyordu. Yani toplam sekiz byte. Bu da 30 - 40 mS zaman demek. Bu süre boyunca PPM sinyali üretilemiyor. Master kumanda da bu kadar uzun süre sinyal gelmeyince artık trainer kablosu takılı değil diye algılıyor. Sinyal sonradan geri gelse de bir şey değişmiyor. Hatta Aurora yazılımındaki bir bug nedeniyle bazen ana kumanda da kontrol etmemeye başlıyor ve model kontrolsüz kalıyor. Korkunç!!!
İşte bu gece bu özelliği saptayınca iki ayrı önlem aldım. Birincisi sadece değişen trim değerini EEPROM'a yazıyorum. İkincisi her byte'ı yazdıktan sonra zamanı kontrol ediyorum ve fazla gecikme olduysa bir "porsiyon" PPM sinyali üretip sonra EEPROM ile işime devam ediyorum. Tabii yine de aklıma gelmeyen bir sorun olabilir. Uçak ile test etmek şart.
Demem o ki, çok basit bir EEPROM işlevi için bile kütüphane kullanınca o kütüphanenin ayrıntılarını anlamak gerekiyor ki böyle beklenmedik sıkıntılar yaşanmasın.
FERDİ İKİZ
Çalışkan Uye
Gerçek lövye ile model uçurmak
Helal olsun Sümer abi. Gerçekten süper bir alet çıkartmışsın, bende lövyeyle uçmak isterim ama ne programlama bilirim nede evde kartlarım var. Bende şöyle birşey düşünüyordum bunun için, modeli biri eğitim diğeri ana kumanda olarak iki kumandayla eşleştireceğim. Kumandalardan birini Sol stick için, diğerini sağ stick için kullanacağım. Mekanizmada değişiklikler yapınca biraz kabada olsa uygulanabilir görünüyor.
Helal olsun Sümer abi. Gerçekten süper bir alet çıkartmışsın, bende lövyeyle uçmak isterim ama ne programlama bilirim nede evde kartlarım var. Bende şöyle birşey düşünüyordum bunun için, modeli biri eğitim diğeri ana kumanda olarak iki kumandayla eşleştireceğim. Kumandalardan birini Sol stick için, diğerini sağ stick için kullanacağım. Mekanizmada değişiklikler yapınca biraz kabada olsa uygulanabilir görünüyor.
Kadir Kurt
Kıdemli Uye

Mehmet Kucuksari
Administrator
Gerçek lövye ile model uçurmak
Inisten Sonraki hakli gurur ve sevincin gercekten her seyi acikliyor abi. Yeni upgrade sonrasi sistem Cok daha mukemmel olacak belli. Ellerine emegine saglik. Tum bu surecleri paylasimlarinla bizleri de ortak ettigin icin sonsuz tesekkurler Abi 
Inisten Sonraki hakli gurur ve sevincin gercekten her seyi acikliyor abi. Yeni upgrade sonrasi sistem Cok daha mukemmel olacak belli. Ellerine emegine saglik. Tum bu surecleri paylasimlarinla bizleri de ortak ettigin icin sonsuz tesekkurler Abi
- Katılım
- 17 Eyl 2013
- Mesajlar
- 9,347
- Tepkime puanı
- 24,175
- Yaş
- 63
- Konum
- İstanbul
- Web sitesi
- www.sumeryamaner.com
- İlgi Alanı
- Uçak
Gerçek lövye ile model uçurmak
Sağolun arkadaşlar. Yazılım işi oturduğun yerden olduğu için nispeten kolay. Gerçi olmadık yerlerde öngörülemeyen hatalar çıkıyor ama sistematik bir analizle sonunda hatayı bulabiliyorsun. Bana en zor gelen işin mekanik boyutu. Sistemin mekaniğinden memnun değilim. Merkezleme sorunu var. Bu da hassasiyeti azaltıyor. Daha farklı bir mekanizma tasarlamak gerekecek. Zaten şu anki ilk öncelik sıramda bu var. Mekanik yeterince hassas olmazsa en iyi kodu da yazsan nafile.
Sağolun arkadaşlar. Yazılım işi oturduğun yerden olduğu için nispeten kolay. Gerçi olmadık yerlerde öngörülemeyen hatalar çıkıyor ama sistematik bir analizle sonunda hatayı bulabiliyorsun. Bana en zor gelen işin mekanik boyutu. Sistemin mekaniğinden memnun değilim. Merkezleme sorunu var. Bu da hassasiyeti azaltıyor. Daha farklı bir mekanizma tasarlamak gerekecek. Zaten şu anki ilk öncelik sıramda bu var. Mekanik yeterince hassas olmazsa en iyi kodu da yazsan nafile.
Ömer Erkan
RcFanatik
- Katılım
- 4 Eki 2012
- Mesajlar
- 3,601
- Tepkime puanı
- 6,216
- Yaş
- 68
- Konum
- Başiskele - Kocaeli
- İlgi Alanı
- Uçak
Gerçek lövye ile model uçurmak
Sümer bey, bu durum kablosuz eğitim sisteminde de olabilir mi? Yani kullandığımız FrSky alıcı da PPM sinyali üretiyor ve kullandığım öğretmen kumandası Aurora. Acaba öğrenci kumandası uzun süre hareketsiz kalınca benzer bir durum oluşabilir mi?
Sümer Yamaner' Alıntı:...
Bu da 30 - 40 mS zaman demek. Bu süre boyunca PPM sinyali üretilemiyor. Master kumanda da bu kadar uzun süre sinyal gelmeyince artık trainer kablosu takılı değil diye algılıyor. Sinyal sonradan geri gelse de bir şey değişmiyor. Hatta Aurora yazılımındaki bir bug nedeniyle bazen ana kumanda da kontrol etmemeye başlıyor ve model kontrolsüz kalıyor. Korkunç!!!
...
Sümer bey, bu durum kablosuz eğitim sisteminde de olabilir mi? Yani kullandığımız FrSky alıcı da PPM sinyali üretiyor ve kullandığım öğretmen kumandası Aurora. Acaba öğrenci kumandası uzun süre hareketsiz kalınca benzer bir durum oluşabilir mi?
Gerçek lövye ile model uçurmak
Sanmıyorum çünkü alıcı zaten var olan sinyali çıkışa iletiyor. Kendisi yeniden üretmiyor.
SM-N910C cihazımdan Tapatalk kullanılarak gönderildi
Sanmıyorum çünkü alıcı zaten var olan sinyali çıkışa iletiyor. Kendisi yeniden üretmiyor.
SM-N910C cihazımdan Tapatalk kullanılarak gönderildi
- Katılım
- 17 Eyl 2013
- Mesajlar
- 9,347
- Tepkime puanı
- 24,175
- Yaş
- 63
- Konum
- İstanbul
- Web sitesi
- www.sumeryamaner.com
- İlgi Alanı
- Uçak
Gerçek lövye ile model uçurmak
Hava şiddetli rüzgarlı olunca uçuş günü iptal oldu. Ben de kodun temel işlevlerini baştan yazdım bugün.
Hatırlarsanız EEPROM yazılması esnasında oluşan gecikme sistemin yanıt vermemesine yol açıyordu. Ben de madem zaman kritik işlem PPM sinyalinin oluşturulması, o halde onu interruptlara havale ederim diye düşündüm. Kısa sayılabilecek bir çalışma ve test aşaması sonrası aşağıdaki kod oluştu. Şimdi tek derdim kanal isimlerinin aileron, elevator vs gibi oluşu. Onları da bir array içinde toplayacağım daha sonra. Ama şu an bu kod hem simülatörde hem de gerçek alıcı verici ve servolarla gayet güzel çalışıyor. Endpoint ayarları, trim ayarları, gaz kanalında trimin sadece alt uca etki etmesi gibi tüm gerekli özellikler de sorunsuz çalışıyor. Kod aynı zamanda simülatör kumandası için de kullanılabilir.
Hava şiddetli rüzgarlı olunca uçuş günü iptal oldu. Ben de kodun temel işlevlerini baştan yazdım bugün.
Hatırlarsanız EEPROM yazılması esnasında oluşan gecikme sistemin yanıt vermemesine yol açıyordu. Ben de madem zaman kritik işlem PPM sinyalinin oluşturulması, o halde onu interruptlara havale ederim diye düşündüm. Kısa sayılabilecek bir çalışma ve test aşaması sonrası aşağıdaki kod oluştu. Şimdi tek derdim kanal isimlerinin aileron, elevator vs gibi oluşu. Onları da bir array içinde toplayacağım daha sonra. Ama şu an bu kod hem simülatörde hem de gerçek alıcı verici ve servolarla gayet güzel çalışıyor. Endpoint ayarları, trim ayarları, gaz kanalında trimin sadece alt uca etki etmesi gibi tüm gerekli özellikler de sorunsuz çalışıyor. Kod aynı zamanda simülatör kumandası için de kullanılabilir.
Kod:
/* Uçuş alanında kullanılacak lövye sistemi için program
Aileron A0
Elevatör A1
Throttle A2
Rudder A3
Aileron trim left D2
Aileron trim right D3
Elevatör trim down D4
Elevatör trim up D5
Rudder trim left D6
Rudder trim right D7
Throttle trim down D8
Throttle trim up D9
Kanal 5 D11
Kanal 6 D12
PPM çıkışı D10
Elevator Down ve Throttle Up trimlerini birlikte 3 saniye
basılı tutunca tüm trimler sıfırlanıyor
Elevator Up ve Throttle down trimlerini birlikte 3 saniye
basılı tutunca çıkış sinyali invert oluyor
*/
#include <EEPROM.h>
const int atva = 100; // Aileron travel percentage
const int etva = 100; // Elevator travel percentage
const int rtva = 100; // Rudder travel percentage
// Throttle endpointleri modele göre belirlenecek
unsigned int epa1 = 100; // Percent (Low end)
unsigned int epa2 = 100; // Percent (High end)
unsigned int tepa1;
unsigned int tepa2;
boolean a_rev;
boolean e_rev;
boolean t_rev;
boolean r_rev;
boolean ch5_rev;
boolean ch6_rev;
boolean ch7_rev;
boolean ch8_rev;
const int aileronin = 0;
const int elevatorin = 1;
const int throttlein = 2;
const int rudderin = 3;
const int PPMout = 10;
const int LED = 13;
const int aileronleft = 2;
const int aileronright = 3;
const int elevatordown = 4;
const int elevatorup = 5;
const int rudderleft = 6;
const int rudderright = 7;
const int throttledown = 8;
const int throttleup = 9;
const int ch5in = 11;
const int ch6in = 12;
const int ch7in = 11;
const int ch8in = 12;
// Donanımsal verilere göre elde edilen endpointler.
const int a1 = 106;
const int a2 = 782;
const int e1 = 150;
const int e2 = 846;
const int t1 = 0;
const int t2 = 793;
const int r1 = 290;
const int r2 = 472;
// Donanımın sunduğu hareket alanları
int a;
int e;
int t;
int r;
int channels[8];
volatile int channels_int[8];
int ailerontrim;
int elevatortrim;
int throttletrim;
int ruddertrim;
byte keyread;
byte keyread1;
byte keyread2;
int resetcount = 0;
int modecount = 0;
boolean sinyal = HIGH; // Pozitif PPM pulse ile başlıyoruz istenirse reverse ediliyor
boolean LEDstatus = HIGH;
volatile boolean PPM_ON = false;
unsigned int keycounter;
volatile int current_channel;
volatile unsigned int framelength = 16000;
ISR(TIMER1_COMPA_vect)
{
TCNT1 = 0;
if (digitalRead(PPMout) == sinyal)
{
digitalWrite(PPMout, !sinyal);
OCR1A = 600;
}
else
{
digitalWrite(PPMout, sinyal);
if (current_channel < :coolxf:
{
OCR1A = 2 * channels_int[current_channel] - 600;
current_channel++;
PPM_ON = true;
}
else
{
current_channel = 0;
OCR1A = (22500 - framelength) * 2;
PPM_ON = false;
}
}
}
void setup()
{
for (int n = 2; n < 10; n++)
{
pinMode(n, INPUT_PULLUP);
}
pinMode(ch5in, INPUT_PULLUP);
pinMode(ch6in, INPUT_PULLUP);
pinMode(PPMout, OUTPUT);
pinMode(LED, OUTPUT);
digitalWrite(LED, LOW);
digitalWrite(PPMout, sinyal);
EEPROMread();
TCCR1A = 0;
TCCR1B = 2; // Prescaler 8
TIMSK1 = 0;
a = a2 - a1;
e = e2 - e1;
t = t2 - t1;
r = r2 - r1;
epa1 = 500 - (5 * epa1); // Bu aşamada artık throttle epa değerleri
epa2 = 500 + (5 * epa2); // 0 ile 1000 arasında değişir hale getiriliyor
TCNT1 = 0;
OCR1A = 12000; // İlk sync pulse 6 mS
TIMSK1 = 2;
}
void loop()
{
digitalWrite(LED, LEDstatus);
readall();
while(PPM_ON);
framelength = 0;
for(int n = 0; n < 8; n++)
{
channels_int[n] = channels[n];
framelength = framelength + channels[n];
}
keys();
}
void EEPROMread()
{
/* Aileron 0, 1 MSB, LSB
Elevator 2, 3 MSB, LSB
Throttle 4, 5 MSB, LSB
Rudder 6, 7 MSB, LSB
*/
ailerontrim = (EEPROM.read(0) << :coolxf: + EEPROM.read(1);
elevatortrim = (EEPROM.read(2) << :coolxf: + EEPROM.read(3);
throttletrim = (EEPROM.read(4) << :coolxf: + EEPROM.read(5);
ruddertrim = (EEPROM.read(6) << :coolxf: + EEPROM.read(7);
}
void EEPROMwrite()
{
/* Aileron 0, 1 MSB, LSB
Elevator 2, 3 MSB, LSB
Throttle 4, 5 MSB, LSB
Rudder 6, 7 MSB, LSB
*/
int x;
byte m;
byte l;
x = ailerontrim >> 8;
m = x & 255;
l = ailerontrim & 255;
EEPROM.update(0, m);
EEPROM.update(1, l);
x = elevatortrim >> 8;
m = x & 255;
l = elevatortrim & 255;
EEPROM.update(2, m);
EEPROM.update(3, l);
x = throttletrim >> 8;
m = x & 255;
l = throttletrim & 255;
EEPROM.update(4, m);
EEPROM.update(5, l);
x = ruddertrim >> 8;
m = x & 255;
l = ruddertrim & 255;
EEPROM.update(6, m);
EEPROM.update(7, l);
}
void resettrims()
{
resetcount++;
if (resetcount > 100) // Throttle up ve elevator down 2 saniyeden fazla basılı tutulduysa...
{
ailerontrim = 0;
elevatortrim = 0;
throttletrim = 0;
ruddertrim = 0;
EEPROMwrite();
resetcount = 0;
digitalWrite(LED, LOW);
for (int z = 0; z < 5; z++)
{
digitalWrite(LED, HIGH);
delay(200);
digitalWrite(LED, LOW);
delay(200);
}
}
}
void changemode()
{
modecount++;
if (modecount > 100)
{
modecount = 0;
sinyal = !sinyal;
digitalWrite(LED, LOW);
for (int z = 0; z < 10; z++)
{
digitalWrite(LED, HIGH);
delay(100);
digitalWrite(LED, LOW);
delay(100);
}
}
}
void keys()
{
keyread1 = PIND | B00000011;
keyread2 = PINB | B11111100;
keyread = keyread1 & B11111100;
keyread = keyread | (keyread2 & B00000011);
/* keyread1 PORT D'yi okuyor (digital 0 - 7)
keyread2 PORT B'yi okuyor (digital 8 - 13)
keyread2'deki iki LSBit daha sonra keyread'daki iki LSBit yerine aktarılıyor
Böylece...
keyread
-------------------------------------------------
I 7 I 6 I 5 I 4 I 3 I 2 I 1 I 0 I
I Rud I Rud I Elv I Elv I Ail I Ail I Thr I Thr I
I R I L I Up I Dn I R I L I Up I Dn I
-------------------------------------------------
*/
if (keyread < 255)
{
/* 2 saniye boyunca Elevator down ve throttle up trimi
basılı tutulursa trimler resetleniyor
Bu süreyi resetcount değişkeni tutuyor ve resettrims()
altprogramında güncellenip 100'ü geçince
reset işlemi uygulanıyor
*/
if (keyread == B11101101)
{
resettrims();
return;
}
if (keyread == B11011110)
{
changemode();
return;
}
resetcount = 0;
keycounter++;
if ((keycounter & B00000011) != 0) return; // Her dört frame'de bir trimler değiştiriliyor
if ((keyread & B00000001) == 0)
{
if (t_rev == 0)
{
throttletrim--;
}
else
{
throttletrim++;
}
}
if ((keyread & B00000010) == 0)
{
if (t_rev == 0)
{
throttletrim++;
}
else
{
throttletrim--;
}
}
if ((keyread & B00000100) == 0)
{
if (a_rev == 0)
{
ailerontrim--;
}
else
{
ailerontrim++;
}
}
if ((keyread & B00001000) == 0)
{
if (a_rev == 0)
{
ailerontrim++;
}
else
{
ailerontrim--;
}
}
if ((keyread & B00010000) == 0)
{
if (e_rev == 0)
{
elevatortrim--;
}
else
{
elevatortrim++;
}
}
if ((keyread & B00100000) == 0)
{
if (e_rev == 0)
{
elevatortrim++;
}
else
{
elevatortrim--;
}
}
if ((keyread & B01000000) == 0)
{
if (r_rev == 0)
{
ruddertrim--;
}
else
{
ruddertrim++;
}
}
if ((keyread & B10000000) == 0)
{
if (r_rev == 0)
{
ruddertrim++;
}
else
{
ruddertrim--;
}
}
if (throttletrim < -300) throttletrim = -300;
if (throttletrim > 300) throttletrim = 300;
if (ailerontrim < -300) ailerontrim = -300;
if (ailerontrim > 300) ailerontrim = 300;
if (elevatortrim < -300) elevatortrim = -300;
if (elevatortrim > 300) elevatortrim = 300;
if (ruddertrim < -300) ruddertrim = -300;
if (ruddertrim > 300) ruddertrim = 300;
EEPROMwrite();
}
}
void readall()
{
channels[0] = analogRead(aileronin);
channels[0] = analogRead(aileronin);
channels[0] = analogRead(aileronin);
channels[0] = map(channels[0], a1, a2, 0, 1000);
channels[0] = map(channels[0], 0, 1000, (500 - 5 * atva), (500 + 5 * atva));
if (a_rev == 0)
{
channels[0] = 1000 + channels[0] + ailerontrim;
}
else
{
channels[0] = 2000 - channels[0] + ailerontrim;
}
channels[1] = analogRead(elevatorin);
channels[1] = analogRead(elevatorin);
channels[1] = analogRead(elevatorin);
channels[1] = map(channels[1], e1, e2, 0, 1000);
channels[1] = map(channels[1], 0, 1000, (500 - 5 * etva), (500 + 5 * etva));
if (e_rev == 0)
{
channels[1] = 1000 + channels[1] + elevatortrim;
}
else
{
channels[1] = 2000 - channels[1] + elevatortrim;
}
channels[2] = analogRead(throttlein);
channels[2] = analogRead(throttlein);
channels[2] = analogRead(throttlein);
tepa1 = epa1 + throttletrim;
tepa2 = epa2;
channels[2] = map(channels[2], t1, t2, tepa1, tepa2);
if (t_rev == 0)
{
channels[2] = 1000 + channels[2];
}
else
{
channels[2] = 2000 - channels[2];
}
channels[3] = analogRead(rudderin);
channels[3] = analogRead(rudderin);
channels[3] = analogRead(rudderin);
channels[3] = map(channels[3], r1, r2, 0, 1000);
channels[3] = map(channels[3], 0, 1000, (500 - 5 * rtva), (500 + 5 * rtva));
if (r_rev == 0)
{
channels[3] = 1000 + channels[3] + ruddertrim;
}
else
{
channels[3] = 2000 - channels[3] + ruddertrim;
}
if (ch5_rev == 0)
{
channels[4] = 1000 + 1000 * digitalRead(ch5in);
}
else
{
channels[4] = 2000 - 1000 * digitalRead(ch5in);
}
if (ch6_rev == 0)
{
channels[5] = 1000 + 1000 * digitalRead(ch6in);
}
else
{
channels[5] = 2000 - 1000 * digitalRead(ch6in);
}
if (ch7_rev == 0)
{
channels[6] = 1000 + 1000 * digitalRead(ch7in);
}
else
{
channels[6] = 2000 - 1000 * digitalRead(ch7in);
}
if (ch8_rev == 0)
{
channels[7] = 1000 + 1000 * digitalRead(ch8in);
}
else
{
channels[7] = 2000 - 1000 * digitalRead(ch8in);
}
for (int n = 0; n < 8; n++)
{
channels[n] = constrain(channels[n], 800, 2200);
}
}Mehmet Kucuksari
Administrator
Gerçek lövye ile model uçurmak
Bugün de boş geçmemişsin be abi
Sent from my iPhone using Tapatalk
Bugün de boş geçmemişsin be abi
Sent from my iPhone using Tapatalk
- Katılım
- 17 Eyl 2013
- Mesajlar
- 9,347
- Tepkime puanı
- 24,175
- Yaş
- 63
- Konum
- İstanbul
- Web sitesi
- www.sumeryamaner.com
- İlgi Alanı
- Uçak
Gerçek lövye ile model uçurmak
Bağımlılık bu işte... Şu an expo ile cebelleşiyorum. Yarına kadar halletmeliyim.
Bağımlılık bu işte... Şu an expo ile cebelleşiyorum. Yarına kadar halletmeliyim.
- Katılım
- 17 Eyl 2013
- Mesajlar
- 9,347
- Tepkime puanı
- 24,175
- Yaş
- 63
- Konum
- İstanbul
- Web sitesi
- www.sumeryamaner.com
- İlgi Alanı
- Uçak
Gerçek lövye ile model uçurmak
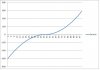
Sanırım expo da oldu!
Değerleri yazdırıp Excel'e aktarıp grafik çizdirdim. Tam olması gerektiği gibi çıkıyor. Her bir kanal expo hesabı 800 mikrosaniye kadar sürüyor (kayar nokta hesaplamaları olduğu için). Aileron, elevator ve rudder kanallarında olacağı için yaklaşık 2.4 mS ek süre gerektiriyor. Normalde girişleri okuma süresi yaklaşık 1.5 mS idi. Demek ki kabaca 4 mS olacak. Yani yaklaşık 6 mS süreli sync darbesi içinde halledilebilecek...
Sıra geldi gerçek hayatta teste!
Burada - % 30 expo ve % 80 endpoint ayarı ile üretilen sinyallerin grafiğini görüyorsunuz.
[attachimg=1]
NOT: Simülatörde belirgin olarak fark etti expolu hali.
Sanırım expo da oldu!
Değerleri yazdırıp Excel'e aktarıp grafik çizdirdim. Tam olması gerektiği gibi çıkıyor. Her bir kanal expo hesabı 800 mikrosaniye kadar sürüyor (kayar nokta hesaplamaları olduğu için). Aileron, elevator ve rudder kanallarında olacağı için yaklaşık 2.4 mS ek süre gerektiriyor. Normalde girişleri okuma süresi yaklaşık 1.5 mS idi. Demek ki kabaca 4 mS olacak. Yani yaklaşık 6 mS süreli sync darbesi içinde halledilebilecek...
Sıra geldi gerçek hayatta teste!
Burada - % 30 expo ve % 80 endpoint ayarı ile üretilen sinyallerin grafiğini görüyorsunuz.
[attachimg=1]
NOT: Simülatörde belirgin olarak fark etti expolu hali.
Ekli dosyalar
- Katılım
- 17 Eyl 2013
- Mesajlar
- 9,347
- Tepkime puanı
- 24,175
- Yaş
- 63
- Konum
- İstanbul
- Web sitesi
- www.sumeryamaner.com
- İlgi Alanı
- Uçak

Mehmet Kucuksari
Administrator
Gerçek lövye ile model uçurmak
Boyle bir hocasi olan ogrencinin zaten basarili olmasina sasmamak lazimSümer Yamaner' Alıntı:Sıfırcı Hoca'dan uçuşa uygunluk sertifikamızı da aldık ayrıntılı testler sonucunda.
Benzer konular



