Arkadaşlar yine bir inceleme ve ayar videosu ile burdayım, banggood da baya iyi bir indirime girince hemen bitane pixhawk 2.4.8 kontrol ünitesi satın aldım, ayarları zor denilmekle birlikte nasıl olsa çözeriz diyerek aldım , fpvci bir arkadaş çok kaliteli bir ürün olduğundan bahsetmişdi zaten, sadece ayarları zordur deniliyordu, bende madem alıp ayar yapıcam bir parça montaj ve misson planer ile ayar videosu çekeyim dedim. pixhawkın yanında ben şimdilik uçakda kullanacağım için yine indirimlerden faydalanarak bir adet neo 8m gps, power module ve ppm encoder satın aldım. benim kumandam jr dsx9 olduğu için direk ppm çıkışı vermiyor bu nedenle böyle bir aparat lazımdı, eğer sizin kumandanızda ppm çıkış varsa buna ihtiyaç duymazsınız (örneğin taranis).
Parçalarımızın Pixhawk üzerine montaj videosu :
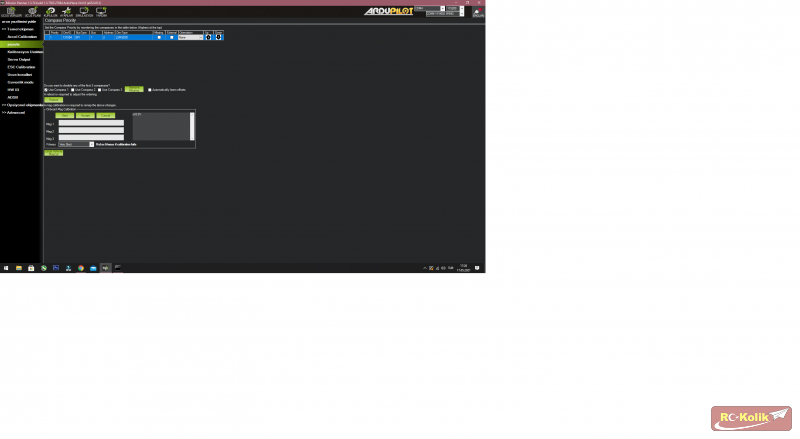
Mission Planer programı ile bilgisayarda pixhawkımızı ayarlama videosu :
-------------------------------------------------------
17.02.18 tarihli ILAVE
pixhawk kurduğum uçağın resmini koyalım önce
evet öncelikle kumandadan arm olmama olayını nasıl kapattığımı gösteren resmi ekleyeyim , aşağıdaki resimde arming yazan kısımları 0 yaparak kumandadan arm olma olayını kapattım ve sadece uçak üzerindeki güvenlik buttonu ile arm ediyorum.
şimdide uçağın stabil uçuş modunda uçarken (ben fbwa kullanıyorum) sağa ve sola yatma açısı yukarı ve aşağıya yükselme ve dalma açılarını nasıl ayarlıcamızı anlattığım videoyu ekliyorum, yalnız video baya kötü çıkmış tek başıma çekim yapınca birde resim ekledim o nedenle, bu ayar şu işimize yarıyor videoda da söylediğim gibi uçağın yatacağı mx açıyı belirleyince bu açıdan daha fazla oto pilot uçağı yatırmadığı için en acemi kişi bile uçağı rahatca düşürmeden kontrolü kaybetmeden uçurabiliyor. ayar yapılan kısmın resmi ve video aşağıda. ben havada benim uçakda kendi kullanımıma göre sağa ve sola 45 derece olarak yukarı 20 derece ve aşağıya -25 derece ayarladım, manuel modda ise tüm kontrol bende olacak şekilde ayarlı zaten.
-------------------------------------------------------------------------------------------------------------------
Pixhawka OSD Bağlama
Pixhawka OSD Programlama
Pixhawka OSD üzerinden Pil Voltaj Takibi
Parçalarımızın Pixhawk üzerine montaj videosu :
Bu VIDEOYU görmek için izniniz yok. Giriş yap veya üye ol
Mission Planer programı ile bilgisayarda pixhawkımızı ayarlama videosu :
Bu VIDEOYU görmek için izniniz yok. Giriş yap veya üye ol
-------------------------------------------------------
17.02.18 tarihli ILAVE
pixhawk kurduğum uçağın resmini koyalım önce
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
evet öncelikle kumandadan arm olmama olayını nasıl kapattığımı gösteren resmi ekleyeyim , aşağıdaki resimde arming yazan kısımları 0 yaparak kumandadan arm olma olayını kapattım ve sadece uçak üzerindeki güvenlik buttonu ile arm ediyorum.
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
şimdide uçağın stabil uçuş modunda uçarken (ben fbwa kullanıyorum) sağa ve sola yatma açısı yukarı ve aşağıya yükselme ve dalma açılarını nasıl ayarlıcamızı anlattığım videoyu ekliyorum, yalnız video baya kötü çıkmış tek başıma çekim yapınca birde resim ekledim o nedenle, bu ayar şu işimize yarıyor videoda da söylediğim gibi uçağın yatacağı mx açıyı belirleyince bu açıdan daha fazla oto pilot uçağı yatırmadığı için en acemi kişi bile uçağı rahatca düşürmeden kontrolü kaybetmeden uçurabiliyor. ayar yapılan kısmın resmi ve video aşağıda. ben havada benim uçakda kendi kullanımıma göre sağa ve sola 45 derece olarak yukarı 20 derece ve aşağıya -25 derece ayarladım, manuel modda ise tüm kontrol bende olacak şekilde ayarlı zaten.
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Bu VIDEOYU görmek için izniniz yok. Giriş yap veya üye ol
-------------------------------------------------------------------------------------------------------------------
Pixhawka OSD Bağlama
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
Pixhawka OSD Programlama
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
Pixhawka OSD üzerinden Pil Voltaj Takibi
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
Moderatör tarafında düzenlendi: