Hezarfen ekibimizden ve forumumuzun da üyesi olan sevgili
@Türker ören yeni bir uçak topluyor. Önce uçaktan biraz söz edeyim. Adana'da harika kompozit jetler tasarlayıp üreten Erdal Candan ve Özkan Albayrak arkadaşlarımızın yaklaşık 2 yıllık emeği olan Pilatus PC21. Full kompozit gövde ve kanatlar içeren 50 cc ve 2 m bir model. Bununla ilgili ilerleyen günlerde detaylı paylaşım yapabileceğimi umuyorum.
Türker kardeşim (sanırım biraz fakir olduğu için!

) koskoca uçağa sekiz kanal alıcı takacak. Ehh scale uçak. Yok yok. Freni vs var. Tabii kanal sayısı yetmiyor. Elevatördü, flaptı onları reverser ya da servo programlama ile çözüyoruz ama kanal sayısı yine yetmiyor. Türker de dahiyane bir fikirle geldi. "Abi neden jikle servosunu kill switch kanalı üzerinden kontrol etmiyoruz" dedi.
İşte bu projenin başlangıcı böyle oldu. Hızlı bir proje oldu doğrusu. Çünkü Türker ile bunları dün konuştuk ve bugün elimizde hazır bir prototip var.
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Öncelikle kill switch kanalı üç konumlu bir butona atanıyor. Buton gerideyken ateşleme kapalı. Orta konumda hem ateşleme açık hem de jikle devrede. Üst konumda sadece ateşleme açık ama jikle devre dışı. Diyeceksiniz ki "eee ne var bunda?". Haklısınız. Ama bildiğiniz gibi SumeronicsRC kill switch'i "akıllı" kill switch. Motoru kapatmak için çift tıklama gerektiriyor. İyi ama siz butonu uçuşta yanlışlıkla orta konuma alırsanız ateşleme kapanmasa da jikle devreye girecek ve motor yine de duracak. O zaman ne lazım? Ateşlemenin RPM çıkışını okumak! Eğer devir yaklaşık 900'ün üstündeyse devremiz jikleyi asla aktive etmiyor. SumeronicsRC ürünlerini takip edenler, jiklesi servo ile kontrol edilen modeller için böyle bir koruma devremiz olduğunu hatırlarlar. İşte bu işlevi yeni devreye ekleyince tamamen güvenli bir sistem çıkıyor ortaya.
Şunu söyleyebilirsiniz: Jikle butonun üst konumunda devreye girsin, niye ortada devreye alıyorsun? O zaman normal uçuş konumu orta pozisyon olur ve çift tıklamayla da motoru kapatabilirsin. Evet bu şekilde o sorun çözülür ama uçuşta yanlışlıkla jikleyi aktive etme riskini ortadan kaldırmaz.
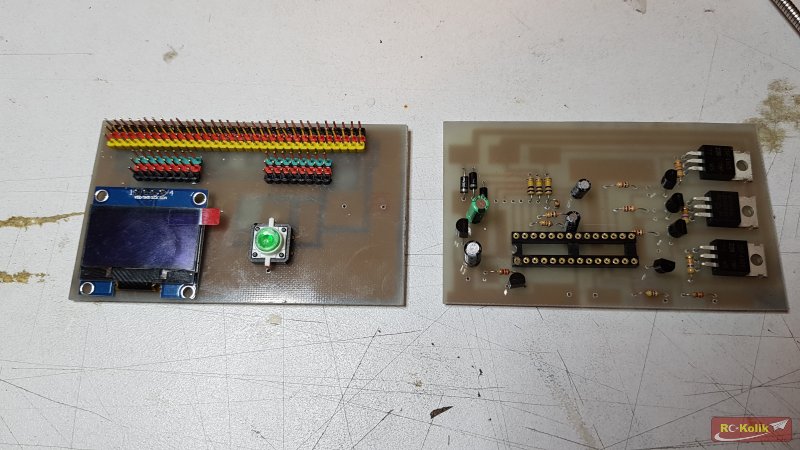
Bu arada devrede fark edeceğiniz gibi üç adet buton var. Bir de LED tabii ki. Bu üç butonun ikisine birlikte basarak programlama moduna giriyoruz. Neyi mi programlıyoruz? Tabii ki jikle servosu endpointlerini. Bu ayar kalıcı hafızada saklanıyor ve normalde bir kez yapılması gerekiyor.
Boyutlar yaklaşık 7 x 4 x 2 cm. Büyük bir uçakta sıkıntı yaratmaz.
Kısaca beni heyecanlandıran ve 24 saat içinde çalışan bir prototipe ulaşmamı sağlayan bu projede ilk fikri veren Türker kardeşime teşekkür ederim.
 Güzel günlerde kırımsiz bol keyifli uçuşlar dileriz
Güzel günlerde kırımsiz bol keyifli uçuşlar dileriz