Merhaba ilk defa konu açıyorum yanlış açıyorsam kusura bakmayın
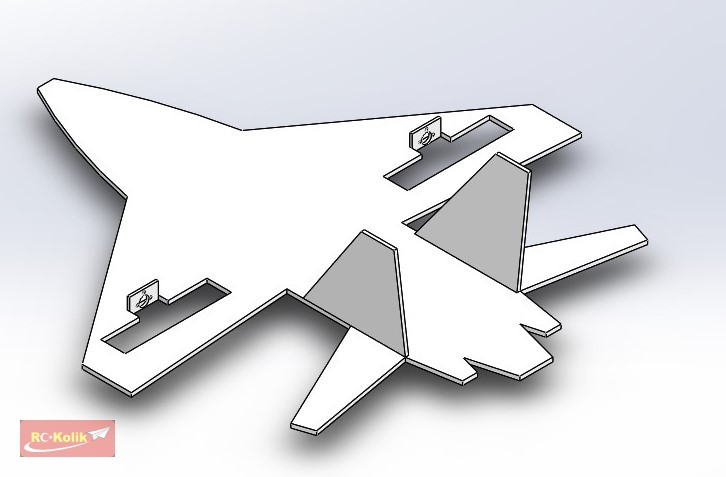
İlk defa bir model yaptım ve dış gövdeyi hazır 3d printer modeli seçtim (fpv orca v2). Bu model uçar mı eksikleri neler ?
Ağırlığı şuan 650-700 gram civarı ve pixhawk bagladim(yardımcı pilot ve modifikasyon için) ağırlık merkezi kanadın 1/4 önünde olması gerekiyor yazmış üretici ama 1/4 olan yeri iple astığım zaman çok az birşey öne gidiyor sorun olur mu ?
Özellikleri
Pixhawk 2.4.8(gps WiFi telemetri vb. dahil)
4s 1800 mah lipo
4s 30 amper esc
Emax rs2205 2300 kv
Pervane olarak 5040 düşünüyorum çünkü 6040 varken esc çok ısınıyor zaten 6040 fazla sanırım bu motora ve ortalama 800 gram civarı thrust sağlayacak sanırım.
Bu uçak düzgün bir şekilde uçar mi sizce ?
Bu VIDEOYU görmek için izniniz yok. Giriş yap veya üye ol
İlk defa bir model yaptım ve dış gövdeyi hazır 3d printer modeli seçtim (fpv orca v2). Bu model uçar mı eksikleri neler ?
Ağırlığı şuan 650-700 gram civarı ve pixhawk bagladim(yardımcı pilot ve modifikasyon için) ağırlık merkezi kanadın 1/4 önünde olması gerekiyor yazmış üretici ama 1/4 olan yeri iple astığım zaman çok az birşey öne gidiyor sorun olur mu ?
Özellikleri
Pixhawk 2.4.8(gps WiFi telemetri vb. dahil)
4s 1800 mah lipo
4s 30 amper esc
Emax rs2205 2300 kv
Pervane olarak 5040 düşünüyorum çünkü 6040 varken esc çok ısınıyor zaten 6040 fazla sanırım bu motora ve ortalama 800 gram civarı thrust sağlayacak sanırım.
Bu uçak düzgün bir şekilde uçar mi sizce ?
Moderatör tarafında düzenlendi: