Arkadaşlar pixhawk kullanarak Rover araç yapmaya çalışıyorum konu ile bilgisini olan arkadaşlarla bilgi paylaşımı yapmak isterim.
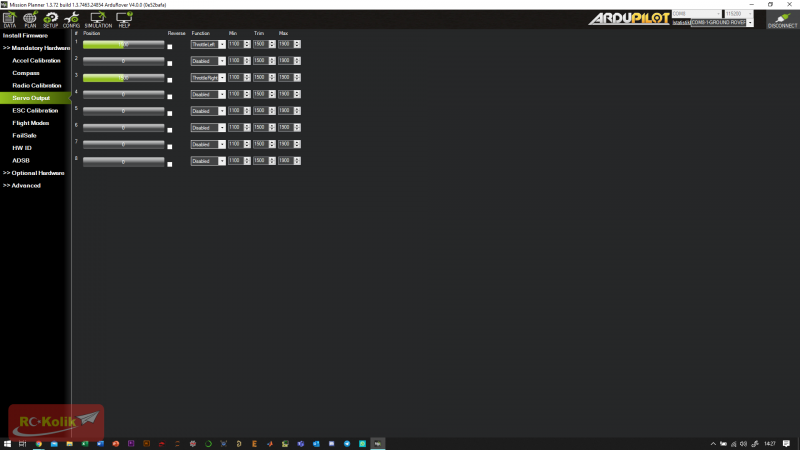
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol