- Katılım
- 17 Eyl 2013
- Mesajlar
- 9,037
- Tepkime puanı
- 23,650
- Yaş
- 62
- Konum
- İstanbul
- Web sitesi
- www.sumeryamaner.com
- İlgi Alanı
- Uçak
Bilenleriniz vardır. Bülent Deveci arkadaşımız airliner ustasıdır ülkemizin. Önce A330, sonra A340, B727, Tupolev TU154 gibi birçok dev jet airliner modelini inşa edip uçurmuştur.,
Yukarıda saydığım uçakların çoğunun kanat geometrisi "swept wing" olarak tanımlanır. Yani kanatlar bir ok gibi geriye açılıdırlar. Bu tür kanatlar verimlilik, yüksek sürat vs gbi avantajlarına karşın çok önemli bir dezavantaja sahiptirler. Dikey eksen etrafındaki dönmeler yani "yaw" hareketi bu uçaklarda çok kuvvetli bir "roll" momentine yol açar yani uçak çok hızlı bir şekilde bir tarafa yatıp terse bile geçebilir. İlgilenen olursa bunun aerodinamik detayını konuşuruz.
Özellikle motorları kanatta olan çok motorlu uçaklarda bir motorun havada durması çok hızlı bir "yaw" hareketine neden olur ve siz daha ne olduğunu anlayamadan uçak terse geçip çakılmış olabilir. Bunu önlemenin tek yolu ise doğru tarafa tam rudder komutu vermektir.
Özellikle A330 - A340 ve gelmesi beklenen B787 gibi modellerde pilotun en büyük korkusu havada bir motoru kaybetmektir. B727 ya da TU154 gibi uçaklarda motorlar kuyrukta ve gövdeye çok yakın oldukları için oluşan momentler çok daha küçüktür.
İşte uzun zamandır bu konu üzerinde fikir yürütüyorduk ve ilk aşama ürünümüz ortaya çıktı.
Öncelikle iki motordan devir verisi almamız gerekiyordu. Tabii ki ticari üretim ECU'lerden bunu almak imkansızdı. O zaman farklı bir yol denedik. Motorlara zaten üzerlerinde var olan devir okuyucu Hall sensörlerinin yanına bir tane Hall sensörü daha eklemeyi düşündük. Belki de varolan sensörden bir kablo çıkarmak söz konusu olabilecek.
Devir verileri merkezi kontrol devresine gelecek. Her iki motor devri sürekli izlenip arada belirlenenden fazla fark olduğu zaman bir dizi önlem alınacak.
İlk aşamada bu önlem basitçe bir gyronun devreye alınması şeklinde düşünüldü. Çünkü elektronik açıdan en kolay yapılacak şey bu. Bu amaçla PowerBox sistemlerinin üretimi olan tek kanallı bir iGyro kullanmaya karar verdik (elde olan oydu çünkü). Motor kaybı durumunda gyro tam hassasiyetle devreye alınıyor ve bu şekilde kuyruğu tutabilmesi amaçlanıyor.
Daha ileriki aşamalarda ruddere otomatik kontrol edilmesi, motor nasellerinin altına monte edilecek bir powerLED ile hangi motorun durduğunun aşağıya bildirilmesi, sağlam motorun geçici olarak otomatik birşekilde rölantiye çekilerek uçağın kontrolünün kolaylaştırılması gibi özellikler planlandı.
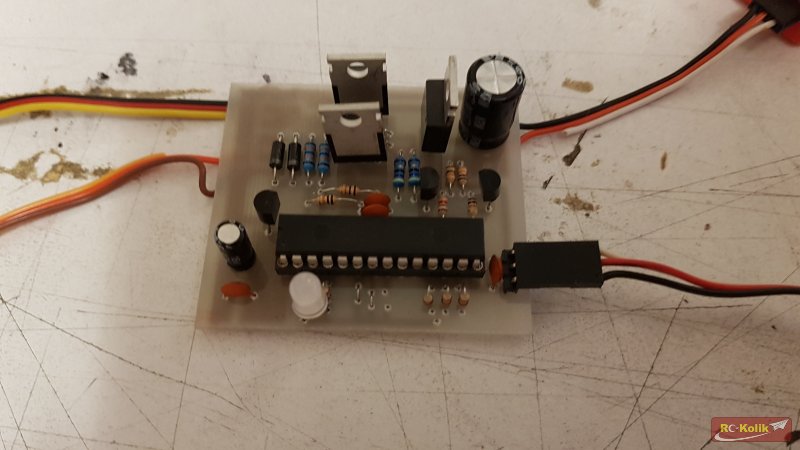
Burada ilk prototipi görüyorsunuz. Sinyal jeneratörleri kullanılarak sistem test edildi ve oldukça güzel çalıştığı görüldü.
Bu arada neden gyro sürekli devrede değil diye sorabilirsiniz. Bülent arkadaşımız öyle bir durumda uçağın aşırı derecede hantallaştığından şikayetçi. O nedenle sadece acil durumda devreye girmesini istedi. Bu sistem uçakta başarılı olursa müthiş bir pazarı olacağını iddia ediyor. Bakalım göreceğiz...
Yukarıda saydığım uçakların çoğunun kanat geometrisi "swept wing" olarak tanımlanır. Yani kanatlar bir ok gibi geriye açılıdırlar. Bu tür kanatlar verimlilik, yüksek sürat vs gbi avantajlarına karşın çok önemli bir dezavantaja sahiptirler. Dikey eksen etrafındaki dönmeler yani "yaw" hareketi bu uçaklarda çok kuvvetli bir "roll" momentine yol açar yani uçak çok hızlı bir şekilde bir tarafa yatıp terse bile geçebilir. İlgilenen olursa bunun aerodinamik detayını konuşuruz.
Özellikle motorları kanatta olan çok motorlu uçaklarda bir motorun havada durması çok hızlı bir "yaw" hareketine neden olur ve siz daha ne olduğunu anlayamadan uçak terse geçip çakılmış olabilir. Bunu önlemenin tek yolu ise doğru tarafa tam rudder komutu vermektir.
Özellikle A330 - A340 ve gelmesi beklenen B787 gibi modellerde pilotun en büyük korkusu havada bir motoru kaybetmektir. B727 ya da TU154 gibi uçaklarda motorlar kuyrukta ve gövdeye çok yakın oldukları için oluşan momentler çok daha küçüktür.
İşte uzun zamandır bu konu üzerinde fikir yürütüyorduk ve ilk aşama ürünümüz ortaya çıktı.
Öncelikle iki motordan devir verisi almamız gerekiyordu. Tabii ki ticari üretim ECU'lerden bunu almak imkansızdı. O zaman farklı bir yol denedik. Motorlara zaten üzerlerinde var olan devir okuyucu Hall sensörlerinin yanına bir tane Hall sensörü daha eklemeyi düşündük. Belki de varolan sensörden bir kablo çıkarmak söz konusu olabilecek.
Devir verileri merkezi kontrol devresine gelecek. Her iki motor devri sürekli izlenip arada belirlenenden fazla fark olduğu zaman bir dizi önlem alınacak.
İlk aşamada bu önlem basitçe bir gyronun devreye alınması şeklinde düşünüldü. Çünkü elektronik açıdan en kolay yapılacak şey bu. Bu amaçla PowerBox sistemlerinin üretimi olan tek kanallı bir iGyro kullanmaya karar verdik (elde olan oydu çünkü). Motor kaybı durumunda gyro tam hassasiyetle devreye alınıyor ve bu şekilde kuyruğu tutabilmesi amaçlanıyor.
Daha ileriki aşamalarda ruddere otomatik kontrol edilmesi, motor nasellerinin altına monte edilecek bir powerLED ile hangi motorun durduğunun aşağıya bildirilmesi, sağlam motorun geçici olarak otomatik birşekilde rölantiye çekilerek uçağın kontrolünün kolaylaştırılması gibi özellikler planlandı.
Burada ilk prototipi görüyorsunuz. Sinyal jeneratörleri kullanılarak sistem test edildi ve oldukça güzel çalıştığı görüldü.
Bu arada neden gyro sürekli devrede değil diye sorabilirsiniz. Bülent arkadaşımız öyle bir durumda uçağın aşırı derecede hantallaştığından şikayetçi. O nedenle sadece acil durumda devreye girmesini istedi. Bu sistem uçakta başarılı olursa müthiş bir pazarı olacağını iddia ediyor. Bakalım göreceğiz...
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol

 Biz hala doğru dürüst bir digital takometre bulsak da pervanemiz kaç tur atıyor ona baksak diyoruz ama... ?
Biz hala doğru dürüst bir digital takometre bulsak da pervanemiz kaç tur atıyor ona baksak diyoruz ama... ?